Principal Curve 入門
- Principal Curve(主曲線)
Principal Curve(主曲線)
Principal ComponentとPrincipal Curve
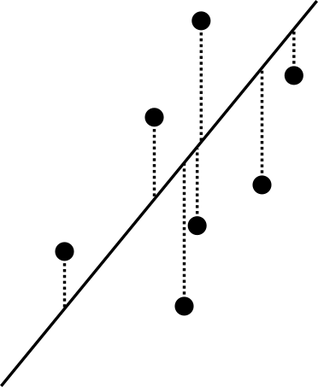
$\boldsymbol{R} ^ d$内で$N$個のデータがどのように分布しているかを,比較的簡単な式で表したい(次元を減らしたい)時がある.一つのよく知られた方法は,線形回帰である.これは,線形関数$f$を用いて,$f(x _ 1,\ldots,\check{x} _ i,\ldots,x _ d)$の式を考え,実際のデータとの差の分散
が最小となるようにする.これは,$\boldsymbol{R} ^ d$内で,$x _ i$軸に沿った,データ点と直線の距離の2乗平均を最小にするのに等しい(図).
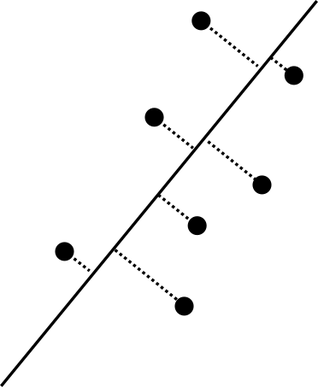
これに対し,主成分分析では,同じく直線を考えるが,その直線に関する成分の2乗和
が最大となる単位ベクトル$\boldsymbol{e} _ 1$を方向ベクトルとする直線を第1主成分とする.ここで,各データ点と直線の距離を$d(\boldsymbol{x} _ k)$とすれば,
なので,主成分分析は各データ点との距離の2乗平均
が最小となるような直線を選ぶことに等しい(図).
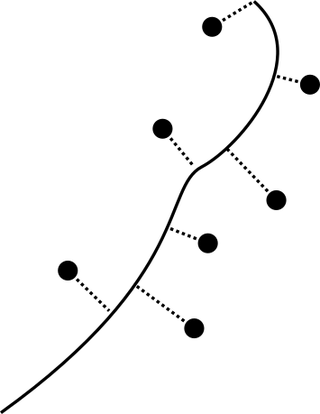
Principal Curve Analysisはデータ点を曲線で代表する方法である.各データ点とその曲線上への射影点との距離の2乗平均が最小となるような曲線を考える(図).
Principal Curveの定義
$\boldsymbol{R} ^ p$内に確率密度$h$に従って分布した点を$\boldsymbol{X}$で表す.$E(\boldsymbol{X})=0$としても一般性を失わない.$C ^ \infty$級曲線$\boldsymbol{f}:\boldsymbol{R}\supset\Lambda\to\boldsymbol{R} ^ p$を考える.ただし$\boldsymbol{f}$は自己交叉しないものとする:
また,パラメータ$\forall\lambda\in\Lambda$について$\boldsymbol{f}$は単位速さであるとする:
$\boldsymbol{X}$の$\boldsymbol{f}$に関するprojection index $\lambda _ {\boldsymbol{f}}:\boldsymbol{R} ^ p\to\boldsymbol{R}$を次のように定義する:
すなわち,$\boldsymbol{x}$の$\boldsymbol{f}$に関するprojection index $\lambda _ {\boldsymbol{f}}(\boldsymbol{x})$は,$\boldsymbol{x}$に最も近い$\boldsymbol{f}$の点に対応するパラメータのうち最大のものである.
定義A
曲線$\boldsymbol{f}$をself-consistentである,もしくはprincipal curveであるとは,全ての$\lambda\in\Lambda$に対し,
が成立することである(Hastie and Stuetzle, 1989).
つまり,projection index $\lambda _ {\boldsymbol{f}}(\boldsymbol{x})$によって$\lambda$に射影される$\boldsymbol{R} ^ p$の全ての点$\boldsymbol{X}$を考える.そのような$\boldsymbol{X}$の平均がちょうど$\boldsymbol{f}(\lambda)$になるのである.
Principal Curveは主成分の自然な拡張である.それは次の定理によって分かる:
定理1
$\boldsymbol{u} _ 0\cdot\boldsymbol{v} _ 0=0$とすると,直線$l(\lambda)=\boldsymbol{u} _ 0+\lambda\boldsymbol{v} _ 0$がself-consistentならば,それは主成分である.
証明
projection indexの性質(最短距離を指すパラメータが複数ある場合は最大値を取る)によって,異なる$\lambda$の原像$\lambda _ {\boldsymbol{f}}{} ^ {-1}(\lambda)$は交わらない.よって,${\boldsymbol{X}}$は,projection indexによって$\lambda$に写る$\boldsymbol{X}$の集合の直和で表される:
よって,$\boldsymbol{X}$の平均は,ある$\lambda$にprojection indexによって写される$\boldsymbol{X}$の平均$\boldsymbol{X} _ \lambda=E(\boldsymbol{X}\mid\lambda _ {\boldsymbol{f}}(\boldsymbol{X})=\lambda)$の$\lambda$に関する平均に等しい:
両辺$\boldsymbol{u} _ 0$で内積を取れば,$\boldsymbol{u} _ 0\cdot\boldsymbol{v} _ 0=0$なので
projection indexによって$\lambda$に写る$\boldsymbol{X}$について$\boldsymbol{u} _ 0$,つまり$l$は原点を通るので,
$\boldsymbol{X}$の共分散行列を$\Sigma$とすれば,
となるので,
projection indexの存在
補題2.1
全ての$\boldsymbol{x}\in\boldsymbol{R} ^ p$と$r>0$に対し,集合$Q{\lambda\mid|\boldsymbol{x}-\boldsymbol{f}(\lambda)|\leq r}$はコンパクトである.
証明
$Q$が$\boldsymbol{R} ^ {p}$の有界な閉集合であることが言えれば良い.
$|\boldsymbol{x}-\boldsymbol{f}(\lambda)|$は$\lambda$の連続関数で,値域が閉球体$B ^ \ast(0,r)$であるので,その原像$Q$も閉集合である.
$Q$が有界でないと仮定する.$|\boldsymbol{x}-\boldsymbol{f}(\lambda _ i)|\leq r$を満たす点列$\lambda _ 1,\ldots$が存在する.$B ^ \ast(\boldsymbol{x},2r)$を考える.$\boldsymbol{f}$は$\lambda _ i$から$\lambda _ {i+1}$の間で,ずっと$B ^ \ast(\boldsymbol{x},2r)$の中にあるか,一度$B ^ \ast(\boldsymbol{x},2r)$を出た後,再び入ってくる.何れにせよ,$\boldsymbol{f}$は単位速さであったから,$\boldsymbol{f}(\lambda _ i)$から$\boldsymbol{f}(\lambda _ i{i+1})$までの曲線の長さは少なくとも$\min(2r,\lambda _ {i+1}-\lambda _ i)$である.よって,仮定により${\lambda _ n} _ {n\in\boldsymbol{N}}$が$B(\boldsymbol{x},2r)$内で無限長を持つことになり,矛盾である.
補題2.2
全ての$\boldsymbol{x}\in\boldsymbol{R} ^ p$に対し,$|\boldsymbol{x}-\boldsymbol{f}(\lambda)|=\inf _ {\mu\in\Lambda}|\boldsymbol{x}-\boldsymbol{f}(\mu)|$なる$\lambda\in\Lambda$が存在する.
証明
$r=\inf _ {\mu\in\Lambda}|\boldsymbol{x}-\boldsymbol{f}(\mu)|$,$B={\mu\mid|\boldsymbol{x}-\boldsymbol{f}(\mu)|\leq2r}$とする.$B$は空でなく,コンパクトなので,最大値・最小値が存在する.よって,$\inf _ {\mu\in\Lambda}|\boldsymbol{x}-\boldsymbol{f}(\mu)|=\inf _ {\mu\in B}|\boldsymbol{x}-\boldsymbol{f}(\mu)|$が成立する.
$d(\boldsymbol{x},\boldsymbol{f})=\inf _ {\mu\in\Lambda}|\boldsymbol{x}-\boldsymbol{f}(\mu)|$とする.
定理2
projection index $\lambda _ {\boldsymbol{f}}(\boldsymbol{x})=\sup _ \lambda{\lambda\mid|\boldsymbol{x}-\boldsymbol{f}(\lambda)|=d(\boldsymbol{x},\boldsymbol{f})}$はwell-definedである.
証明
${\lambda\mid|\boldsymbol{x}-\boldsymbol{f}(\lambda)|=d(\boldsymbol{x},\boldsymbol{f})}$は補題\ref{existence _ of _ parameter _ set}から空でなく,補題\ref{compact _ Q}からコンパクトと分かる.
ambiguity pointの集合の測度
補題3.1
$\boldsymbol{x}$の最近点が$\boldsymbol{f}(\lambda _ 0)\ (\lambda _ 0\in\Lambda _ 0)$(ただし,$\lambda _ 0$はパラメータ範囲$\Lambda _ 0$の端点ではないとする)なら,$\boldsymbol{x}$は超平面$(\boldsymbol{x}-\boldsymbol{f}(\lambda _ 0))\cdot\boldsymbol{f}’(\lambda _ 0)$上にある
証明
$\boldsymbol{f}(\lambda _ 0)$は$\boldsymbol{x}$からの距離が最短なので,
定義B
最近点が複数ある($\text{card}{\lambda\mid|\boldsymbol{x}-\boldsymbol{f}(\lambda)|=d(\boldsymbol{x},\boldsymbol{f})}>1$である)点$\boldsymbol{x}$をambiguity pointと呼ぶ.
$M _ \lambda={\boldsymbol{x}\mid(\boldsymbol{x}-\boldsymbol{f}(\lambda))\cdot\boldsymbol{f}’(\lambda)=0}$とする.補題\ref{hyperplane}から,$\boldsymbol{f}(\lambda)$が$\boldsymbol{x}$の最近点で$\lambda\in\Lambda _ 0$なら$\boldsymbol{x}\in M _ \lambda$である.
全ての$\lambda$について,$\boldsymbol{f}’(\lambda)$と直交するよう$p-1$個のベクトル場$\boldsymbol{n} _ 1(\lambda),\ldots,\boldsymbol{n} _ {p-1}(\lambda)$を考える.$\boldsymbol{\chi}:\Lambda\times\boldsymbol{R} ^ {p-1}\to\boldsymbol{R} ^ p$を次の様に定める:
さらに,$M=\boldsymbol{\chi}(\Lambda,\boldsymbol{R} ^ {p-1})=\bigcup _ \lambda M _ \lambda$を,曲線上の点で,曲線と直交する超平面に属する点の集合とする.
定義C
$X$の部分集合族$\mathcal{F}\in2 ^ X$が$\sigma$加法族であるとは,次の性質を満たすことである:
- $A\in\mathcal{F}\Rightarrow A ^ c\in\mathcal{F}$;
- $n\in\boldsymbol{N}$に対し,$A _ n\in\mathcal{F}\Rightarrow\bigcup _ {n\in\boldsymbol{N}}A _ n\in\mathcal{F}$.
$\sigma$加法族の定義から直ちに次のことが証明される:
- $\phi, X\in\mathcal{F}$.
- $n\in\boldsymbol{N}$に対し,$A _ n\in\mathcal{F}\Rightarrow\bigcap _ {n\in\boldsymbol{N}}A _ n\in\mathcal{F}$.
- $A,B\Rightarrow A\cup B\in\mathcal{F}$.
- $A,B\Rightarrow A\cap B\in\mathcal{F}$.
定義D
$\mathcal{F}$を$X$の$\sigma$加法族とする.$\mu:\mathcal{F}\to\boldsymbol{R}\cup{+\infty}$が測度であるとは次の性質を満たすことである:
- $A\in\mathcal{F}$に対し$0\leq\mu(A)\leq+\infty$;
- $A _ i,A _ j\in\mathcal{F}\ (i\neq j\in\boldsymbol{N})$に対し,$A _ i\cap A _ j=\varnothing\Rightarrow\mu(\bigcup _ {i\in\boldsymbol{N}}A _ i)=\sum _ {i=1} ^ \infty\mu(A _ i)$.
測度の定義から直ちに次のことが証明される:
- $\mu(\varnothing)=0$.
- $A,B\in\mathcal{F},\quad A\subset B\Rightarrow \mu(A)\leq\mu(B)$.
- $A,B\in\mathcal{F},\quad A\subset B,\quad\mu(B)<+\infty\Rightarrow \mu(B\backslash A)=\mu(B)-\mu(A)$.
- $A _ i\in\mathcal{F}\ (i\in\boldsymbol{N})$に対し,$\mu(\bigcup _ {i\in\boldsymbol{N}}A _ i)\leq\sum _ {i=1} ^ \infty\mu(A _ i)$.
補題3.2
$M$に含まれないambiguity pointの($p$次元)測度は$0$である:$\mu(A\cap M ^ c)$.
証明
$\boldsymbol{x}\in A\cap M ^ c$とする.補題\ref{hyperplane}から,このような点$\boldsymbol{x}$が存在するのは,$\Lambda=[\lambda _ \text{min},\lambda _ \text{max}]$であり,$\boldsymbol{x}$が端点$\boldsymbol{f}(\lambda _ \text{min})$, $\boldsymbol{f}(\lambda _ \text{max})$から等距離にあり,かつそれが曲線$\boldsymbol{f}$との最短である時のみである.これは測度$0$の超平面を形成する.
補題3.3
$E$を測度$0$の集合とする.ambiguity pointの集合$A$の測度が$0$であるためには,$\forall\boldsymbol{x}\in\boldsymbol{R} ^ p\backslash E$に対し,$\mu(A\cap N(\boldsymbol{x}))$なる開近傍$N(\boldsymbol{x})$が存在することが十分である.
証明
開被覆${N(\boldsymbol{x})\mid\boldsymbol{x}\in\boldsymbol{R} ^ p\backslash E}$は明らかに$\bar{A}$を被覆する.$\bar{A}$は$\boldsymbol{R} ^ p$の有界閉集合なのでコンパクトである.よって,${N(\boldsymbol{x})\mid\boldsymbol{x}\in\boldsymbol{R} ^ p\backslash E}$の中から有限個の被覆${N _ i}$を選んで,$A\subset\bar{A}\subset\bigcup _ {i=1} ^ k N _ i$とできる.よって,$\mu(A)\leq\mu(\bigcup _ {i=1} ^ kN _ i\cap A)\leq\sum _ {i=1} ^ {k}\mu(N _ i\cap A)=0$.
補題3.4
$\Lambda$がコンパクトな場合のみ考えても一般性を失わない.
証明
$\Lambda _ n=[-n,n]$, $\boldsymbol{f} _ n=\boldsymbol{f}\mid\Lambda _ n$とし,$A _ n$を$\boldsymbol{f} _ n$のambiguity pointとする.$\boldsymbol{x}$を$\boldsymbol{f}$のambiguity pointとする.補題2.1から${\lambda\mid|\boldsymbol{x}-\boldsymbol{f}(\lambda)|=d(\boldsymbol{x},\boldsymbol{f})}$はコンパクト,つまり$\boldsymbol{R}$の有限閉集合である.
よって,ある$n$が存在し,${\lambda}\in\Lambda _ n$,$\boldsymbol{x}\in A _ n$,$A\subset\bigcup _ {n=1} ^ \infty A _ n$が成立する.ここで,$\mu(A)\leq\mu(\bigcup _ {n=1} ^ \infty A _ n)\leq\sum _ {n=1} ^ \infty\mu(A _ i)$となる.
コンパクトな$\Lambda _ n$を考えて,$\boldsymbol{f} _ n$のambiguity pointの集合$A _ n$について,$\mu(A _ n)=0$を示せばよい.
定義E
写像$f:\boldsymbol{R} ^ m\to\boldsymbol{R} ^ n$について,$\boldsymbol{y}\in\boldsymbol{R} ^ n$が正則値であるとは,$\forall\boldsymbol{x}\in f ^ {-1}(\boldsymbol{y})$について,$f$の微分$f’$の階数が$p$となることである:$\text{rank}(f’(\boldsymbol{x}))=p$.そうでなければ,$\boldsymbol{y}$は臨界値であると言う.
Sardの定理
写像$f:\boldsymbol{R} ^ m\to\boldsymbol{R} ^ n$について$f$の微分可能性が十分高ければ,$f$の臨界値の集合$C$の測度は$0$である.
補題3.5
定義Bで定義した$\boldsymbol{\chi}$の臨界値の集合$C$の測度は$0$である.
証明
$\boldsymbol{\chi}$は$C ^ \infty$級なので,Sardの定理を使う.
定理3
ambiguity pointの集合$A$の測度は$0$である:$\mu(A)=0$.
証明
補題3.4から$\Lambda$がコンパクトの場合のみ考える.補題3.2から$\mu(A\cap M ^ c)=0$.$\boldsymbol{\chi}$の臨界値の集合$C\subset M$を考える.この時,$\mu((A\cap M ^ c)\cup C)=0$なので,補題\ref{measure _ of _ A _ Mc}から,$\forall\boldsymbol{x}\in\boldsymbol{R} ^ p\backslash((A\cap M ^ c)\cup C)=M\backslash C+M ^ c\cap A ^ e$について,$\mu(A\cap N(\boldsymbol{x}))=0$なる近傍$N(\boldsymbol{x})$が存在することを証明すればよい.
$A$の外部$A ^ e$については自明なので,以下では$\forall\boldsymbol{x}\in M\backslash C$(正則値)について,$\mu(A\cap N(\boldsymbol{x}))=0$なる近傍$N(\boldsymbol{x})$が存在することを証明する.
$\boldsymbol{\chi} ^ {-1}\subset\Lambda\times\boldsymbol{R} ^ {p-1}$は有限集合${(\lambda _ 1,\boldsymbol{v _ 1}),\cdots,(\lambda _ k,\boldsymbol{v} _ k)}$である.
仮に,無限集合であったと仮定する.この時,$\boldsymbol{\chi}(\xi _ i,\boldsymbol{w} _ i)=\boldsymbol{x}$を満たす$\Lambda\times\boldsymbol{R} ^ {p-1}$の部分集合${(\xi _ 1,\boldsymbol{w} _ 1),\ldots}$が存在する.$\Lambda$はコンパクト,$\boldsymbol{\chi}$は連続なので,${\xi _ 1,\ldots}$の集積点$\xi _ 0$と対応する$\boldsymbol{w} _ 0$が存在し,$\boldsymbol{\chi}(\xi _ 0,\boldsymbol{w} _ 0)=\boldsymbol{x}$となる.$\boldsymbol{x}$は正則値なので,$\text{rank}(\boldsymbol{\chi}’)=p$である.よって,$(\xi _ 0,\boldsymbol{w} _ 0)$と$\boldsymbol{x}$の近傍で(局所)微分同相になる.よって,これは$\xi _ 0$が集積点であるので矛盾.
$\boldsymbol{\chi}$は正則値なので,$(\lambda _ i,\boldsymbol{v} _ i)$の近傍$L _ i$と$\boldsymbol{x}$の近傍$N(\boldsymbol{x})$で微分同相になる.
この時,$\tilde{N}(\boldsymbol{x})\subset N(\boldsymbol{x})$が存在して,$\boldsymbol{\chi} ^ {-1}(\tilde{N})\subset\bigcup _ {i=1} ^ kL _ i$が成立する.
仮に上記のような$\tilde{N}$が存在しないと仮定する.この時,$\boldsymbol{x}$に収束する点列${\boldsymbol{x} _ i}$が存在し,$(\xi _ i,\boldsymbol{w} _ i)\notin\bigcup _ {i=1} ^ kL _ i$で,$\boldsymbol{\chi}(\xi _ i,\boldsymbol{w} _ i)=\boldsymbol{x} _ i$が成立する.点列${\xi _ i} _ {i\in\boldsymbol{N}}$は集積点$\xi _ 0\in\bigcup _ {i\in\boldsymbol{N}}L _ i$を持つ.しかし,これは$\boldsymbol{\chi}(\xi _ 0,\boldsymbol{w} _ 0)=\boldsymbol{x}$の連続性及び,$\boldsymbol{\chi} ^ {-1}(\boldsymbol{x})$の有限性から矛盾となる.
以上から,$\boldsymbol{y}\in\tilde{N}(\boldsymbol{x})$に対し,$\boldsymbol{\chi}(\lambda _ i(\boldsymbol{y}),\boldsymbol{v} _ i(\boldsymbol{y}))=\boldsymbol{y}$を満たす$(\lambda _ i(\boldsymbol{y}),\boldsymbol{v} _ i(\boldsymbol{y}))$が各$L _ i$に唯一存在する.ここで,$d _ i(\boldsymbol{y})=|\boldsymbol{y}-\boldsymbol{f}(\lambda _ i(\boldsymbol{y}))| ^ 2$とする.補題3.1から,
$\boldsymbol{y}\in\tilde{N}(\boldsymbol{x})$がambiguity pointになるのは,
として,$\boldsymbol{y}\in A _ {ij}\ (\exists i,j;i\neq j)$の時のみである.
$\boldsymbol{f}$は自己交叉しない($\eqref{no-self _ crossing$}が成立する)ので,$\lambda _ i(\boldsymbol{z})\neq\lambda _ j(\boldsymbol{z})$ とすると,$\eqref{grad _ d}$から,
$A _ {ij}$は$p-1$次元多様体であるので,その$p$次元測度は$0$となる:$\mu(A _ {ij})=0$.よって,$\mu(A\cap\tilde{N})=\mu(\bigcup _ {ij}A _ {ij})\leq\sum _ {ij}\mu(A _ {ij})=0$.
bendingアルゴリズム
Principal curveは次のアルゴリズムによって求めることが出来る:
initializaiton
$\boldsymbol{a}$を第1主成分として,$\boldsymbol{f} ^ {0}(\lambda)=\bar{\boldsymbol{x}}+\boldsymbol{a}\lambda$とする.$\lambda ^ {(0)}(\boldsymbol{x})=\lambda _ {\boldsymbol{f} ^ {(0)}}(\boldsymbol{x})=0$とする.
repeat
- $\boldsymbol{f} ^ {(j)}(\cdot)=\boldsymbol{E}(\boldsymbol{X}\mid\lambda _ {\boldsymbol{f} ^ {(j-1)}}=\cdot)$とする
- $\boldsymbol{f} ^ {(j)}(\lambda)$が単位速さとなるように調整する(曲線の形は変わらない).
- $\lambda ^ {(j)}(\boldsymbol{x})=\lambda _ {\boldsymbol{f} ^ {(j)}}(\boldsymbol{x})\quad\forall\boldsymbol{x}\in h$とする.
- $D ^ 2(h,\boldsymbol{f} ^ {(j)})=E _ \lambda E(|\boldsymbol{X}-\boldsymbol{f} ^ {(j)}(\lambda ^ {(j)}(\boldsymbol{X}))| ^ 2\mid\lambda ^ {(j)}(\boldsymbol{X})=\lambda)$を計算する.
until $D ^ 2(h,\boldsymbol{f} ^ {(j)})$がある閾値以下になるまで繰り返す.
これはつまり,点${\boldsymbol{X}}$と曲線の距離の2乗平均が極小値となる曲線を探している.
有限データ点のためのbendingアルゴリズム
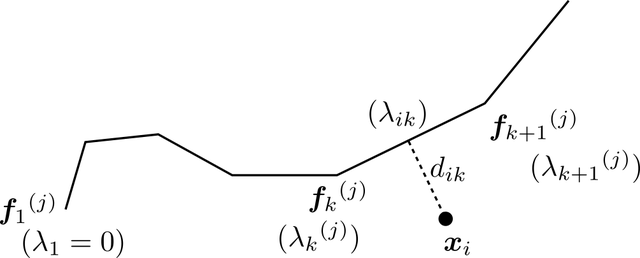
$p$次元の$n$個のデータ点を考える.点が有限の場合,principal curveは$(\lambda _ i,\boldsymbol{f} _ i)$の$n$個の集合になる.曲線は単位速さであるとするので,$\lambda _ i$は$\boldsymbol{f} _ 1$から$\boldsymbol{f} _ i$までの折れ線に沿った距離とする.$\lambda _ 1=0$としておく.
まずは,projection index $\lambda _ {\boldsymbol{f} ^ {(j)}}(\boldsymbol{x} _ i)$を求める.$\boldsymbol{x} _ i$と,$\boldsymbol{f} _ k{} ^ {(j)}$と$\boldsymbol{f} _ {k+1}{} ^ {(j)}$を両端とする線分の最短距離を$d _ {ik}$とする.また,$\boldsymbol{f} _ 1{} ^ {(j)}$から最短距離を与える線分側の点までの折れ線に沿った距離を$\lambda _ {ik}$とする.こうして,$1\leq k\leq n-1$に対し$d _ {ik}$と$\lambda _ {ik}$を求める.
複数データ点のためのprojection index
$\boldsymbol{x} _ i$のprojection index $\lambda _ {i}$は$d _ {ik}$の最小値を与える$\lambda _ {ik}$とする:
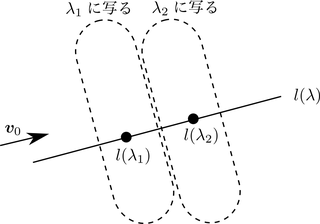
次に,projection indexが$\lambda _ i$になるような点${\boldsymbol{x}}$の平均を求めて,$\boldsymbol{f} ^ {(j+1)}(\lambda _ i)$(つまり$\boldsymbol{f} _ i{} ^ {(j+1)}$)を構成する.しかし,有限データ点の場合は$\lambda _ i$に投影されるのは$\boldsymbol{x} _ i$唯一という状況がほとんどである.よって,projection index $\lambda _ k$が$\lambda _ i$に近い点${\boldsymbol{x} _ k}$を取ってきて,それらの局所平均を取る(linear weighted running-line smoother).
$\lambda _ i$に近い$wn\ (0<w<1)$個の$\lambda _ j$及び点${\boldsymbol{x} _ j}$に対し直線を,重み付け最小2乗法でフィッティングする.この際,各重み付けは$\lambda _ i$で最大値を取って,$\lambda _ i$との差が大きいほど$0$に近いもの,例えば,
などとする.${\boldsymbol{x} _ j}$の平均は,この直線$\boldsymbol{l}(\lambda)$の$\lambda _ i$での値とする:
これによって$n$個の点${\boldsymbol{f} _ i}$が得られる.曲線の長さに従って${\lambda _ {i}{} ^ {(j+1)}}$を定めておく.
k-segmentsアルゴリズム
上に述べたbendingアルゴリズムの他にもPrincipal Curveを求めるアルゴリズムはいくつかあるが,データの曲率が大きかったり,自己交叉があると使い物にならなくなる.それに対処出来るのが,k-segmentsアルゴリズムである(Verbeek, Vlassis, Kr"{o}se, 2001).
直線$s={\boldsymbol{s}(t)=\boldsymbol{c}+\boldsymbol{u}t\mid t\in\boldsymbol{R}}$を考える.点$\boldsymbol{x}$との距離は で定義される.
定義F
$X _ n$を$\boldsymbol{R} ^ d$から取ってきた$n$個のサンプルの集合とする時,Voronoi領域(VR) $V _ 1,\dots,V _ k$を次のように定義する:
つまり,$V _ i$は$i$番目の線$s _ i$が最短となるような$X _ n$の部分集合である.アルゴリズムの目標は全ての点の最短直線との距離の2乗和
を最小にするような$k$本の直線$s _ 1,\ldots,s _ k$を見つけることである.
$\eqref{kmeans _ square _ sum}$を最小にするような$k$本の直線を見つけるためには,ランダムな向きと位置にある$k$本の直線を用意して,次のステップを繰り返せば良い:
- それぞれの直線についてVRを決定する.
- 直線をそれぞれのVRの第1主成分のベクトルで置き換える.
このアルゴリズムが収束することは次のことから分かる:
- $\eqref{kmeans _ square _ sum}$はVRの定義から,第1ステップで減少する.さらに,主成分の性質から,第2ステップでも減少する.
- $X _ n$は有限個なので,VRの構成方法は有限である.
ここで,無限に長い直線ではアルゴリズムの計算量が増えるので,線分に限定する.すなわち,アルゴリズムを次のように変える:
- それぞれの線分についてVRを決定する.
- 線分をそれぞれのVRの第1主成分のベクトルで置き換える.そして,VRのデータ点の第1主成分の分散を$\sigma ^ 2$として,VRの重心から$\frac{3}{2}\sigma$以内の範囲に存在する部分を新しい線分とする.
$k$の決定
$k$を決めるには,$k=1$から初めて,ある条件(線分の上限数やパフォーマンスについての条件など)が満たされるまで増やしていけば良い.
新しい線分の挿入場所を決めるために,各データ点$\boldsymbol{x} _ i$の所に長さ$0$の線分(つまり点$\boldsymbol{c}$)を追加する.この場合,点$\boldsymbol{x}$との最短距離は$d(\boldsymbol{x},s)=|\boldsymbol{x}-\boldsymbol{c}|$で与えられる.よって,この$0$長線分も追加した$k+1$本の成分でVRを構成し,$\eqref{kmeans _ square _ sum}$を計算する.
新しく追加した$0$長線分の中で,$\eqref{kmeans _ square _ sum}$を最も減らすような線分に関するVRを$V _ {k+1}$とする.次に,$V _ {k+1}$での第1主成分のベクトルから,平均からの距離$\frac{3}{2}\sigma$までの線分を作る.これによって$k+1$本の線分が得られた.
有限個の点の集合$S\subset\boldsymbol{R} ^ d$について,平均$\boldsymbol{m}$は2乗距離を最小にする:
よって,任意の$i$に対し
新しい線分$s$は$\boldsymbol{m}$を含むので,$S$内の点から線分への2乗距離和は,$S$内の点から$\boldsymbol{m}$への2乗距離和以下である:
よって,線分の挿入による$\eqref{kmeans _ square _ sum}$の減少には下限が存在することが分かる($V _ {k+1}$を決めた時点で,$\eqref{kmeans _ square _ sum}$の減少は確約されており,以上の式で$S$を$V _ {k+1}$とすれば,そこから更に減少することが言える).
新しい線分の場所の効率的な探し方
あらかじめ$n$個のデータ間の2乗距離を表す$n\times n$行列$D$を考える:
各点$\boldsymbol{x} _ i$に対し,最も近い線分までの2乗距離$d _ i ^ \text{VR}$を求めておく.更に
とおく.ここで,
とする.この時$G _ {ij}$は,$0$長線分を$\boldsymbol{x} _ j$に挿入した時の$\boldsymbol{x} _ i$に関する2乗距離の減少に等しい.よって$\eqref{kmeans _ square _ sum}$の減少は$\sum _ iG _ {ij}$に等しいので,
を考えれば,$0$長線分を$\boldsymbol{x} _ j$に挿入した時の$\eqref{kmeans _ square _ sum}$の減少は$\boldsymbol{I}G$の第$i$成分に等しい.
線分の結合
グラフ$G=(V,E)$を考える.ただし,$V$は$k$本の線分の$2k$個の端点である.更に,$k$本の線分と対応する辺全てを含むような$A\subset E$を考える.全ての頂点を1度ずつつ通過する経路をハミルトニアン経路(HP)と呼ぶ.HPは辺の集合$P\subset E$と考えることができる.線分を結合して多角形のPrincipal Curveを作るために,コストを最小にするようなHP $A\subset P\subset E$(線分に対応する辺を全て含み,かつ全頂点を一度だけ通る経路)を求めたい.経路$P$のコストは
とする.$l(P)$は経路の長さの総和である.辺$e=(v _ i,v _ j)$の長さは
とする.$a(P)$は隣接する角度の和である.$\lambda$を調節することによって,辺の向きが変わることに対するペナルティの重み付けを調節する.
HPを作るためgreedy algorithmで考える.sub-HP $P _ i$と$P _ j$をそれぞれの頂点$v _ i$,$v _ j$で結ぶとする.$e=(v _ i,v _ j)$として,新しくできるsub-HPのコストは元のsub-HPのコストの和と$l(e)+\lambda a(e)$の合計になる.全ての辺$e\in(E\backslash A)$に対し,コスト$c(e)=l(e)+\lambda a(e)$を計算しておく.アルゴリズムは以下のようになる:
- k個のsub-HP $A$から始める.
- 2個以上のsub-HPがある限り続ける.
- $i\neq j$として,2個のsub-HP $P _ i$と$P _ j$を$c(e)$が最小となるような辺$e\in(E-A)$で結ぶ. これによって,折れ線が得られる.
目的関数
最適な$k$を求めるため,データの対数尤度を最大とする折れ線を考える.この折れ線の長さを$l$とし,$\boldsymbol{f}:[0,l]\to\boldsymbol{R} ^ d$で表されるとする.簡単のために,$t\in[0,l]$に対し,$p(t)=\frac{1}{l}$,$p(\boldsymbol{x}\mid t)$は正規分布とする.よって,各データ点の対数尤度への寄与は負号をかけて
となる.ここで,図のように距離を取ると,
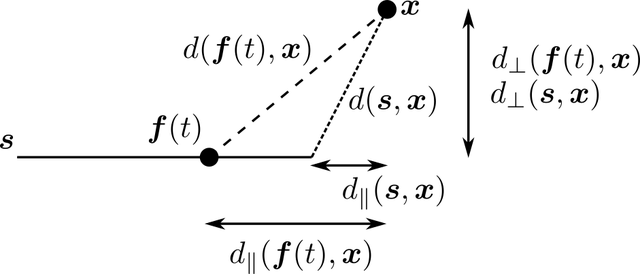
よって,$\eqref{k-segment _ log _ likelihood}$の最後の項は次のように書ける:
$d _ \parallel(\boldsymbol{s},\boldsymbol{x})=\inf _ {t\in[0,l]}d _ \parallel(\boldsymbol{f}(t),\boldsymbol{x})$とする.$\eqref{k-segment _ log _ likelihood}$は次のように近似できる:
よって,全点についての和を取れば,対数尤度に負号をかけたものは
となる.$\eqref{k-segment _ log _ likelihood _ sum}$が初めて極小となる$k$が最適な$k$となる.
参考文献
- Hastie, T. and Stuetzle, W. (1989). Principal Curves. JASA, 84 (406), 502-516. (pdf)
- Hastie, T., Tibshirani, R., and Friedman, J. (2009). The Elements of Statistical Learning: Data Mining, Inference, and Prediction. (2nd ed.). Springer. (website)
- Kegl, B.,Krzyzak, A., Linder, T., and Zeger, K. (2000). Learning and design of principal curves. IEEE. 22 (3), 281-297. (pdf)
- Verbeek, J., Vlassis, N., and Krose, B. (2002). A k-segments algorithm for finding principal curves. Pattern Recognition Letters, Elsevier. 23 (8), 1009–1017. (pdf)